目前,我国焦化煤气废水化工产业发展迅速,以至于出现一系列煤气废水泄露事件,致使水资源环境受到严重污染。但是,由于废水治理产业对于污染水源的轻重程度具有未
知性,致使废水治理检测需求不断增大。本项目针对水下机器人关于煤气废水水质检测弊端,设计将水下检机器人分别从外壳、传感技术、定位勘测、回收与维护系统、预警保护等方面对机器人进行全面的优化。在优化过程中,在外壳及传感器方面,我们设计将碳化硅材料低价的平替煤气废水抗腐蚀外壳,利用钛合金板对于机器人进行封装,大幅减少电离辐射对于器件及电路的损伤,在传感检测方面,设计采用塑料闪烁体检测器结合电化学传感器列阵元件设计,同时利用屏蔽双绞线铜网+铝箔电缆搭配 LVDS 协议保障水下机器人有线式数据传输响应效率。提高对于硫化物含量及 PH 值的检测响应精度。在定位勘测方面,采用 GPS+水深传感器三维定位导航实现高辐射环境下的精准定位。在回收与维护方面,我们在机器人表面涂覆疏水涂层,减少放射性物质附着,便于机器人回收时,可用高压水射将表面辐射性附着物清理掉。在预警方面,由多个传感器部件实时向终端反馈器件状态,若终端检测某个器件状态异常,机器将自动实行返回行为,确保机器在废水下工作安全性。
本设计可为煤气废水治理工业关于污水源的污染轻重程度进行勘测,让治理产业对于煤气污水治理可以实现“抓大头”式治理,大幅降低了煤气污水治理的成本,同时提高了治理行对于污水治理的效率。为实现煤气废水治理过程的污染程度勘测、辅助治理区域定位研究提供理论依据和技术支持。
项目成员:
陈炤宇、李海岩、刘紫竹、覃家川、覃恒毅、
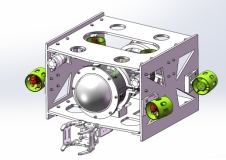
项目成果:
双目摄像头测距:
双目摄像头通过视差计算可以实现 0.5-4.5 米范围内物体测距,误差小于 2cm。采用双目视觉与声呐协同测距技术,通过立体匹配算法实现水下三维空间精准定位,解决低可见度环境下的物体识别问题。结合水下强光源和声呐,在浑浊水域或远距离场景中补充测距数据,构建水下地形图。
在煤气废水污染区域识别放射性废物容器或管道泄漏点,通过双目图像特征提取(如纹理、形状)匹配声呐回波数据,实现污染源快速定位。
 水下机械臂固体采样:
水下机械臂固体采样:
机械臂采用高强度、低密度合金材料,针对不同形态固体切换夹爪模块,可完成从固态核废料到松散沉积物的全类型采样。结合双目视觉动态调整抓取轨迹,确保采样完整性。
集水电磁阀液体采样:
采用 PWM 波控制电磁阀,通过调节 PWM 波占空比精确控制电磁阀开闭时间,稳定采集指定位置水样,较传统液压驱动能耗降低 60%。
信号传输线抗辐射干扰设计:
屏蔽双绞线铜网+铝箔电缆搭配 LVDS 协议,采用石墨烯/碳纳米管复合涂料,对线缆连接点及数据电缆进行覆盖,极大程度削弱γ、β射线导致的信号串扰;对于密封舱内部控制系统及线路连接,将舱内涂抹覆盖耐辐射聚氨酯涂层,可满足对舱体内整体部件的保
护。
水体硫化物含量在线检测装置:
电化学传感器探头能检测出煤气废水硫化物含量的具体数据。其采用高效的 GM 管探测器结合电化学传感器,灵敏度高、响应速度快、能量补偿强,可实时快速检测水中硫化物含量,并测量辐射剂量率。它具备标准接口,可实时传输硫化物含量监测数据,为主机平台提供在线数据,还配备了 PC 专用软件,可连接电脑实时观测数据。其测量范围一般在 0.05~2000μSv/h。适用于海洋、湖泊、河流及地下水等天然水体以及居民饮用水的硫化物物质含量检测。
定性定量双重检测保障:
塑料闪烁体是一种在基质中加入发光物质高温聚合而成的闪烁体,当硫化物元素入射到塑料闪烁体中,硫化物元素与塑料闪烁体发生非弹性碰撞,会被塑料基质吸收,产生电子和空穴,些电子和空穴会将能量传递给发光物质,使其激发并产生荧光即释放出可见光发生闪烁现象。通过塑料闪出起进行定性分析,通过水体放射性在线检测装置进行定量分析,两者结合相互印证,可以避免检测器失灵导致的误差。
从技术层面来看,检测技术不断更新迭代,生物传感器、微流控芯片等新型技术将会应用到煤气废水检测中去,做到更加快速、准确和经济;另外,监测系统的在线应用也会越来越广,能够实时反馈废水水质情况,帮助企业调整处理工艺;再加上公司煤气废水检测的具有优势的技术工艺,日后煤气废水检测行业发展前景良好,我国国内煤气废水检测行业的市场份额不断增加,未来甚至可能会开拓国外的市场。
